快速更改快门速度和亮度
【1】文件下载
- 链接:https://pan.baidu.com/s/1BNWxhJADlhBflLgCeudbvQ 提取码:8888
【2】步骤
-
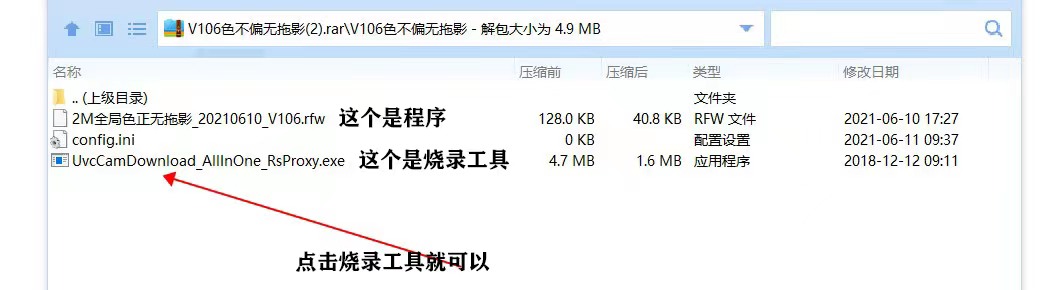
下载程序
-
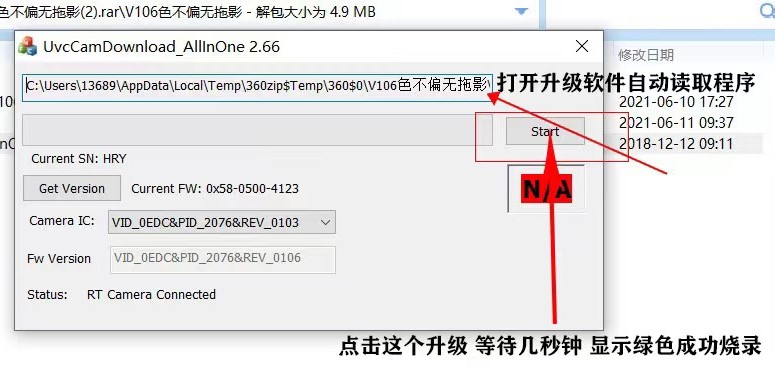
烧录程序
-
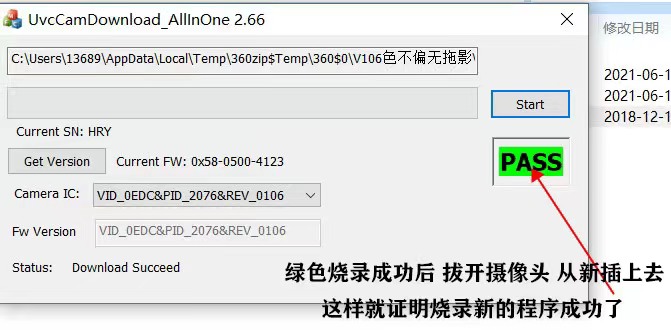
验证成功
相机标定
【1】安装USB相机驱动
- 需提前有一个工作空间
1
2
3
4
cd ~/catkin_ws/src
git clone git://github.com/bosch-ros-pkg/usb_cam.git usb_cam
cd ..
catkin_make -DCATKIN_WHITELIST_PACKAGES=usb_cam
【2】更改USB摄像头编号
- 修改
<param name="video_device" value="/dev/video0" />的参数 - 使用
ls /dev/video*查看摄像头端口
1
2
cd ~/catkin_ws/src/usb_cam/launch
sudo gedit usb_cam-test.launch
【3】启动摄像头
1
roslaunch usb_cam usb_cam-test.launch
【4】相机内参标定
- 安装camera_calibration包
1
sudo apt install ros-melodic-camera-calibration
-
通过
rostopic list确认/usb_cam/image_raw已经发布 -
运行标定程序
1
rosrun camera_calibration cameracalibrator.py --size 8x8 --square 0.025 image:=/usb_cam/image_raw camer:=/usb_cam
此命令运行标定结点的python脚本,其中 :
(1)--size 8x8 为当前标定板的大小(内部角点,棋盘格是9x9的)
(2)--square 0.025为每个棋盘格的边长
(3)image:=/usb_cam/image_raw标定当前订阅图像来源自名为/usb_cam/image_raw的topic
(4)camera:=/usb_cam为摄像机名
- 开始标定
为了达到良好的标定效果,需要在摄像机周围移动标定板,并完成以下基本需求:
(1)移动标定板到画面的最左、右,最上、下方
(2)移动标定板到视野的最近和最远处
(3)移动标定板使其充满整个画面
(4)保持标定板倾斜状态并使其移动到画面的最左、右,最上、下方
- 保存并获取标定结果
当calibration按钮亮起时,代表已经有足够的数据进行摄像头的标定,此时请按下calibration并等待一分钟左右。点击save储存标定结果。通过给出路径查看结果。